볼나사 엑추에이터와 Ezi-Servo 스텝모터를 일체화한 전동 슬라이더
이지로보 IGS시리즈 (Ezi-Robo IGS)
- IGS : Integrated Guide & Standard Linear Actuator
- 볼나사 액추에이터 : 볼나사와 슬라이드 가이드를 콤팩트하게 결합한 부분
고정밀 위치 제어, 고속대응, 컴팩트한 디자인은 자동화 여전히 자동화시장의 핵심적인 요구입니다. 파스텍에서 새롭게 선보이는 이지로보(Ezi-ROBO) IGS 시리즈는 볼나사 액추에이터와 Ezi-SERVO 계열 스테핑모터를 일체화하여 고정밀 위치제어와 콤팩트한 구조가 강점인 전동 슬라이드 액추에이터 솔루션입니다.

스텝모터와 액추에이터를 일체화 했기 때문에 결합 시 수반되는 정밀도 조정이 필요하지 않아 이에 필요한 작업공수를 획기적으로 줄였습니다. 또한 바디프레임에 전용 리니어가이드를 사용하여 설치에 필요한 높이를 대폭 낮출 수 있습니다. Ethernet, EtherCAT, CC-Link IE TSN과 같은 산업용 네트워크를 통해 상위 제어기와 연결할 수 있어 기존 시스템에서 간편하게 적용하여 조작이 가능하며 스테핑모터 특성을 이용하여 게인 조정이 불필요하며 고정밀 인코더를 통해 탈조 없는 운전을 보장합니다. 이지서보가 가지고있는 기존의 장점들과 스테핑모터와의 결합을 통한 고유 기술로 팰릿 간 작업부품 배치 시스템, 부폼 조립 시스템, 자동 도포, 포장, 컨베이어 물류 이송 등 다양한 시스템과 어플리케이션 등 모션제어와 자동화시스템에 최적화된 솔루션입니다.
저희 앱솔루텍은 파스텍 공식 대리점으로서 검증된 정품 제품과 하이레벨의 기술을 신속/정확히 지원합니다.
10년 이상의 공장 자동화 및 모션 제어 전문 경험과 축적된 기술력, 노하우를 바탕으로 고객의 기대를 뛰어넘는 제품과 솔루션을 약속드립니다.
감사합니다.
[파스텍 공식 대리점 주식회사 앱솔루텍]
- 전화 : (본사) 032-719-4966~9, (서울영업소) 02-6396-4316, (경기영업소) 070-4866-4579
- E-mail : solu@abtech.co.kr, absolutech@naver.com, absolutech@daum.net
- 팩스 : 0504-984-4316



[제품의 특징과 장점]
1. 콤팩트형 전동 슬라이더
Ezi-Robo IGS는 볼나사 액추에이터※와 Ezi-SERVO 계열의스테 핑모터를 일체화한 제품으로 두 제품을 결합할 때 수반 되는 정밀도 조정을 하지 않아도 되기 때문에 작업 공수를 크게 줄일 수 있습니다.

2. 콤팩트한 사이즈로 공간 절약
일반적인 리니어 가이드를 적용하지 않고 바디프레임에 전용 리니어 가이드를 설치하므로써 높이를 대폭 낮출 수 있습니다.

3. 각종 네트워크 대응
Ezi-Robo IGS는 EtherCAT, Ethernet, CC-Link IE TSN과 같은 산업용 네트워크를 통해 상위 제어기와 연결할 수 있습니다.

4. 다양한 제품 라인업
다양한 환경에 적용할 수 있도록 직렬 타입 4종과 병렬 타입 2종의 제품을 제공합니다. 병렬 타입은 벨트-풀리가 장착되어 있어 직렬 타입과 비교해 동일 스트로크 대비 제품 길이가 짧습니다.

5. 간단한 원점복귀
Ezi-Robo IGS에서 자주 사용되는 원점복귀 운전을 간단히 수행할 수 있도록 옵션으로 원점 센서 세트를 제공합니다. 이 세트에는 원점복귀에 필요한 모든 부품이 포함되어 있으므로 원점 센서를 쉽게 장착할 수 있습니다.
예) RB-IGS-60S + 원점 센서

6. 발열 최소화 / 에너지 절감
Ezi-SERVO는 부하에 따라 모터 전류를 자동으로 제어합니다. 그에 따라 모터와 드라이브의 발열이 억제되어 에너지를 절감 할 수 있습니다.


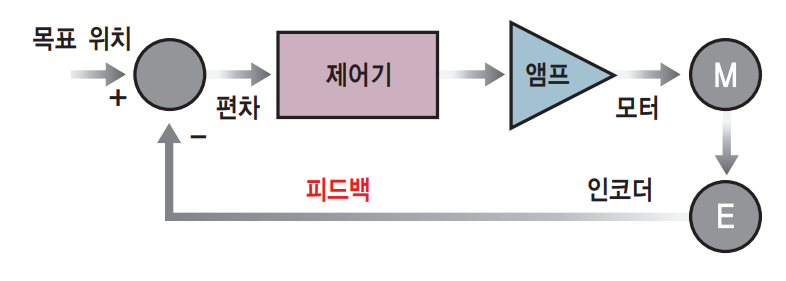
7. 클로즈드 루프 제어시스템(Closed Loop)
Ezi-SERVO는 모터에 장착된 고정밀 인코더로 현재 위치를 상시 파악하기 때문에 탈조가 발생하지 않는 서보시스템입니다. Ezi-SERVO는 50μs마다 인코더로부터 모터의 위치 정보를 받 아 필요한 경우에 위치를 보정합니다
8. No 게인 조정
일반적인 서보시스템에서는 성능을 향상하기 위해 반드시 게인을 조정해야 합니다. 따라서 게인 조정에 많은 시간이 걸리고 부하의 종류에 따라 문제가 발생합니다. 그러나 Ezi-SERVO는 스테핑모터의 특성을 이용하기 때문에 게인을 조정할 필요가 없는 서보시스템입니다.
9. 토크 향상 (모터 전압 상승 및 모터 전류 설정)
Ezi-SERVO는 동작 전류(Run Current)를 150%까지 설정할 수 있으며, 저속에서 가감속 특성과 토크 특성이 증가합니다. Ezi-SERVO는 저속 구간에서 토크를 30% 정도 향상할 수 있습니다

※ 저속에서의 토크는 약 30% 향상 측정조건 : 드라이브 = Ezi-SERVOII-EC-ALL-42L
10. No 헌팅
Ezi-SERVO는 스테핑모터의 특성을 이용하기 때문에 일반적인 서보시스템에서 발생하는 헌팅 문제가 없습니다. 따라서 모터가 완전히 정지하기 때문에 미세 진동이 발생하지 않습니다. 비전 등을 이용한 고속 검사 장비 등에서 Ezi-SERVO는 정지 후 진동 이 발생하지 않기 때문에 위력을 발휘합니다.

11. 부드럽고 정확한 회전
Ezi-SERVO는 기존의 마이크로스텝 구동과 달리 고정밀 인코 더와 고성능 MCU를 통해 벡터 제어와 필터링 제어를 수행하기 때문에 저속에서도 토크 리플을 발생하지 않고 부드럽게 운전 할 수 있습니다.

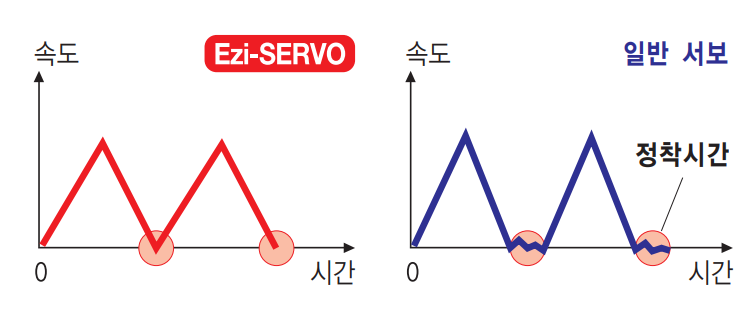
12. 빠른 응답속도
Ezi-SERVO는 지령 위치에 대해 추종성이 매우 높은 스테핑모 터의 장점을 활용하기 때문에 위치결정시간이 대단히 짧습니다. 따라서 단피치 운동이 빈번한 경우에 위치결정시간을 대폭 단 축할 수 있습니다. 종래의 서보시스템에서는 위치 지령에 따른 동작을 완료(안정된 상태로 지령 위치에 도달함)하기 위해서는 정착시간(Settling Time)이 필요하기 때문에 위치결정시간이 늘어납니다. Ezi-SERVO는 스테핑모터의 장점을 이용하여 응답지연시간이 짧은 고속 위치결정이 가능합니다.
13. 높은 분해능
Ezi-SERVO는 용도에 맞춰 위치지령을 세분화하여 분해능을 설정할 수 있습니다. (최대 20,000 펄스/회전)

14. 높은 토크 / 연속 운전
Ezi-SERVO는 저속영역에서 일반적인 서보모터에 비해 높은 토크로 연속 운전이 가능합니다. 또한 Ezi-SERVO는 탈조 하지 않고 100% 부하에서도 연속하여 운전할 수 있기 때문에 기존의 스테핑모터와 달리 토크 마진을 고려할 필요가 없습니다. 회전 속도에 따라 최적의 전류제어를 수행하기 때문에 고속 영역에서 고토크 운전이 가능합니다.

15. 고속 운전
Ezi-SERVO는 인코더로 현재 위치를 감시하여 100% 부하에 대해서도 최대 토크를 활용할 수 있으므로 고속영역에서도 탈조하지 않고 운전이 가능합니다

[응용 사례]


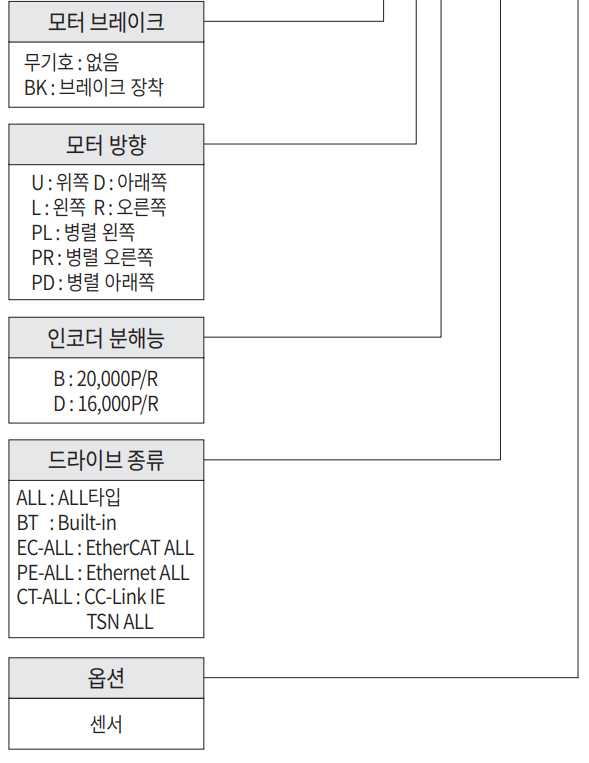
[Ezi-Robo IGS 품명] * Ezi-Robo-IGS-40 S-100-R 2-42 BK U B-드라이브-옵션

[적용 가능 제품]
| 제품명 | 주요 규격 |
| Ezi-SERVO ALL | RS-485 대응, 일체형 |
| Ezi-SERVOⅡ BT | 펄스영 입력, 일체형 |
| Ezi-SERVO2 EtherCAT ALL | Ethernet 대응, 일체형 |
| Ezi-SERVO2 Ethernet ALL | EtherCAT대응, 일체형 |
| Ezi-SERVO2 CC-Link IE TSN ALL | CC-Link IE TSN 대응, 일체형 |

[ 가능한 액추에이터 조합 ]

[ 액추에이터와 드라이브 조합 ]
| 유닛 품명 | 드라이브 종류 | ||||||
| Ezi-Servo-All | Ezi-Servo2-BT | Ezi-Servo2-EtherCAT ALL | Ezi-Servo2-Plus-ALL | Ezi-Servo2-CC-Link IE TSN ALL | |||
| M커넥터 | R커넥터 | M커넥터 | R커넥터 | R커넥터 | |||
| Ezi-Robo-IGS-30S | ○ | ○ | |||||
| Ezi-Robo-IGS-40S Ezi-Robo-IGS-40PL |
○ | ○ | ○ | ○ | ○ | ○ | |
| Ezi-Robo-IGS-50S Ezi-Robo-IGS-50PL |
○ | ○ | ○ | ○ | ○ | ○ | |
| Ezi-Robo-IGS-60S | ○ | ○ | ○ | ○ | ○ | ○ | |
[ 규격표 참고 방법 ]
| 품명 | Ezi-Robo-IGS-40S- □ , Ezi-Robo-IGS-40PL- □ | ||||||
| 액추에이터 종류 | 직렬타입 / 병렬타입 | ||||||
| 리드 mm | 2, 5 | ||||||
| 스트로크 mm | 50 | 100 | 150 | 200 | 250 | ||
| 반복 위치 결정 정밀도 mm | ±0.005 | ||||||
| 최고 속도 mm/s | Lead 2 : 80, Lead 5 : 200 | ||||||
| 허용 하중 | 수평 / 수직 kg |
4 / 4 | |||||
| 허용 모멘트 | [N·m] | MP : 34.7 MY : 34.7 MR : 64.8 | |||||
| 액추에이터 무게 | 직렬 kg | 0.7 | 0.8 | 0.9 | 1 | 1.1 | |
| 병렬 kg | 0.8 | 0.9 | 1 | 1.1 | 1.1 | ||
| 모터 + 브레이크 무게 | 모터 kg / 브레이크 |
0.47 ~ 0.52(모터 종류별 상이) / 0.25 | |||||
- 1 : □은 옵션과 드라이브명이 포함되어 있습니다.
- 2 : 모터의 최고 속도 및 볼나사의 허용 회전수에 의해 제한된 속도입니다.
- 3 : 속도, 가감속도에 따라 허용가능한 하중은 변동됩니다.
- 4 : 허용 모멘트의 방향 정의는 오른쪽 그림과 같습니다.
[ 표시항목 설명 ]
| 1 | 액추에이터 종류 | 직렬 타입과 병렬 타입으로 구분합니다. |
| 2 | 리드 | 모터가 1회전 할 때 볼나사가 직선 방향으로 이동하는 거리입니다 |
| 3 | 스트로크 | 부하를 반송할 수 있는 최대 거리입니다 |
| 4 | 반복 위치 결정 정밀도 | 같은 위치, 같은 방향으로 위치결정을 반복하여 실행했을 때 오차가 어느 정도 발생하는지를 나타내는 값입니다. (정밀도는 온도와 부하가 일정한 경우의 값입니다.) |
| 5 | 최고 속도 | 부하를 반송할 수 있는 최고 속도입니다. |
| 6 | 허용 하중 | 수평 또는 수직 방향으로 사용하는 경우에는 운전 성능 규격으로 동작할 수 있는 최대 하중입니다. |
| 7 | 허용 모멘트 | 가이드레일의 중심에서 벗어난 위치에 작업 대상물을 올려놓을 경우 허용할 수 있는 최대 모멘트를 말합니다. |
| 8 | 액추에이터의 무게 | 액추에이터의 무게입니다. (모터 미장착 기준) |
| 9 | 모터 + 브레이크 무게 | 모터와 브레이크의 무게입니다 |
[ 제품 규격 / IGS30 타입 ]


제품 크기 : 직렬 타입 [mm] Ezi-Robo-IGS-30S-□-R2-28LD-ALL-P

※ IGS40, IGS50, ISG60 타입 정보는 카탈로그를 참고해주세요
시스템 구성도 [ Ezi-SERVO-ALL-28]

시스템 구성도 [ Ezi-SERVOII-BT-28 ]

시스템 구성도 [ Ezi-SERVOII-PE-ALL, M타입]

시스템 구성도 [ Ezi-SERVOII-PE-ALL, R타입]

시스템 구성도 [ Ezi-SERVOII-EC-ALL, M타입 ]

시스템 구성도 [ Ezi-SERVOII-EC-ALL, R타입 ]

시스템 구성도 [ Ezi-SERVOII-CC-Link IE TSN-ALL, R타입 ]

시스템 구성도 [ Ezi-SERVOII-BT-42/56/60 ]

긴 내용 확인해주셔서 감사합니다.
※ 아래 버튼 클릭 시 제품 카탈로그를 다운로드 받으실 수 있습니다.
- 파스텍 종합 카탈로그 다운로드
- 파스텍 이지로보 Ezi-Robo IGS 카탈로그 다운로드
'이지로보' 카테고리의 다른 글
| 스테핑모터와 볼나사 엑추에이터를 일체화한 전동 슬라이더 이지로보 IGH시리즈 (Ezi-Robo IGH) (1) | 2025.03.24 |
|---|---|
| 중공축 모터와 볼나사를 일체화한 리니어 액추에이터 파스텍 이지로보 CLA(Ezi-Robo CLA) (0) | 2025.03.20 |

